Modules¶
SERV is a bit-serial CPU which means that the internal datapath is one bit wide. SERV internal dataflow shows the internal dataflow. For each instruction, data is read from the register file or the immediate fields of the instruction word and the result of the operation is stored back into the register file. Reading and writing memory is handled through the memory interface module.
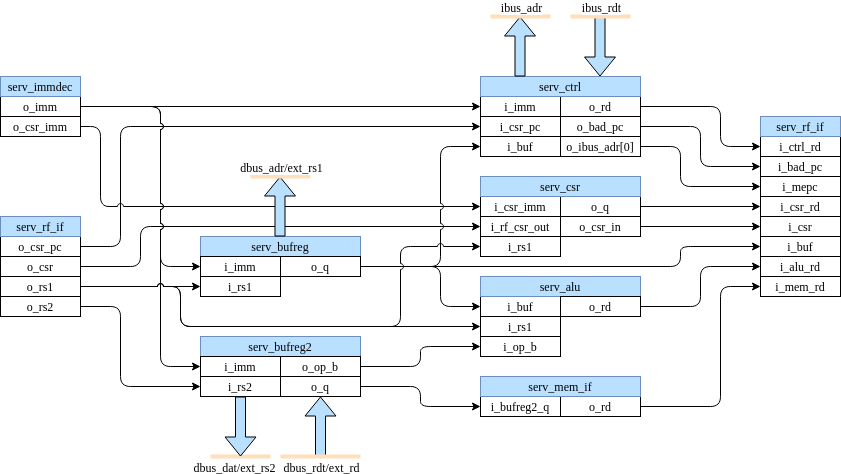
SERV internal dataflow¶
serv_rf_top¶
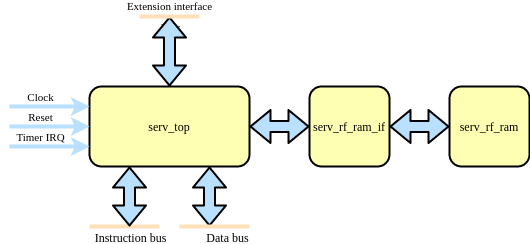
serv_rf_top is a top-level convenience wrapper that includes SERV and the default RF implementation and just exposes the timer IRQ and instruction/data wishbone buses.
serv_top¶
serv_top is the top-level of the SERV core without an RF
serv_alu¶
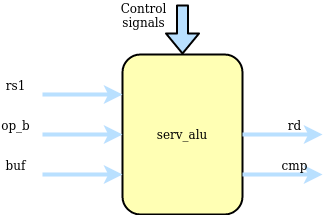
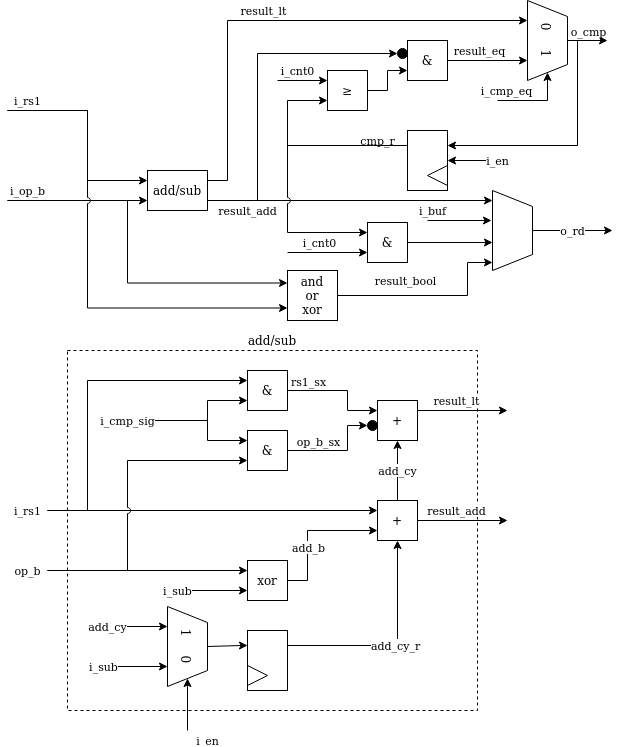
serv_alu handles alu operations. The first input operand (A) comes from i_rs1 and the second operand (B) comes from i_rs2 or i_imm depending on the type of operation. The data passes through the add/sub or bool logic unit and finally ends up in o_rd to be written to the destination register. The output o_cmp is used for conditional branches to decide whether or not to take the branch.
The add/sub unit can do additions A+B or subtractions A-B by converting it to A+B̅+1. Subtraction mode (i_sub = 1) is also used for the comparisons in the slt* and conditional branch instructions. The +1 used in subtraction mode is done by preloading the carry input with 1. Less-than comparisons are handled by converting the expression A<B to A-B<0 and checking the MSB, which will be set when the result is less than 0. This however requires sign-extending the operands to 33-bit inputs. For signed operands (when i_cmp_sig is set), the extra bit is the same as the MSB. For unsigned, the extra bit is always 0. Because the ALU is only active for 32 cycles, the 33rd bit must be calculated in parallel to the ordinary addition. The result from this operations is available in result_lt. For equality checks, result_eq checks that all bits are 0 from the subtraction.
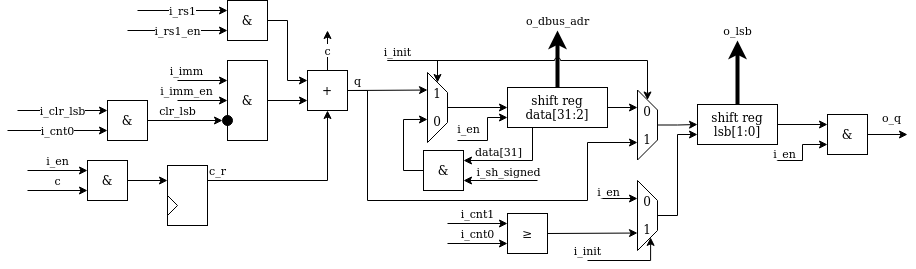
serv_bufreg¶
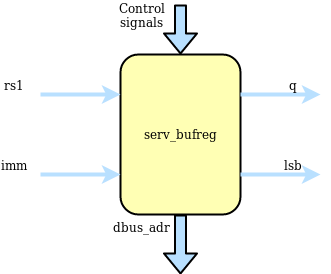
For two-stage operations, serv_bufreg holds data between stages. This data can be the effective address for branches or load/stores or data to be shifted for shift ops. It has a serial output for streaming out results during stage two and a parallel output that forms the dbus address. serv_bufreg also keeps track of the two lsb when calculating addresses. This is used to check for alignment errors. In order to support these different modes, the input to the shift register can come from rs1, the immediate (imm), rs1+imm or looped back from the shift register output. The latter is used for shift operations. For some operations, the LSB of the immediate is cleared before written to the shift register. The two LSB of the shift register are special. When the shift register is loaded, these two get written first before the rest of the register is filled up. This allows the memory interface to check data/address alignment early.
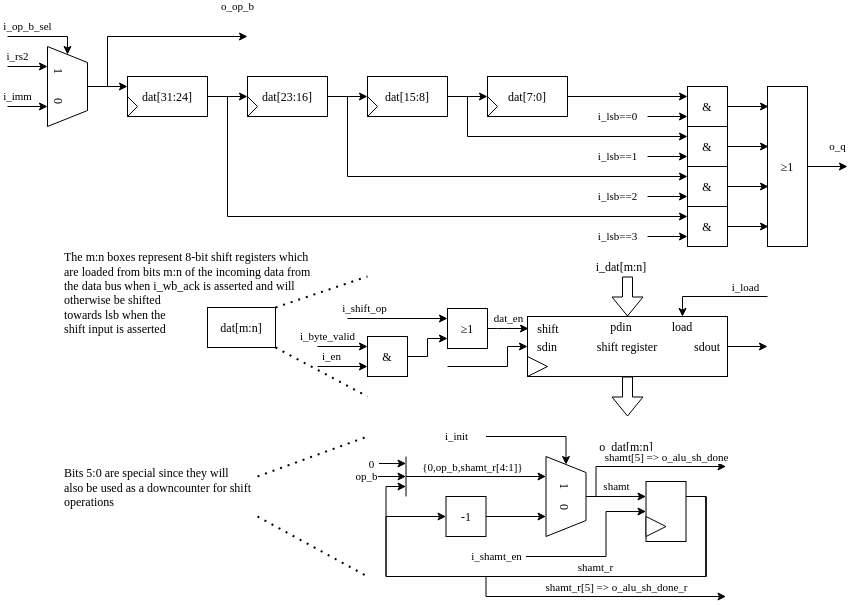
serv_bufreg2¶
serv_bufreg2 is a 32-bit buffer register with some special features. It is used for shift operations to store the shift amount. It’s used in load and store operations to store the data to be written or be read from the data bus, and it holds rs2 for the SERV extension interface. For shift and store operations, the register is shifted in from MSB when dat_en is asserted, while for loads and uses of the extension interface, the whole data word is written to when the i_load signal is asserted. Once the data is in the buffer, it is used differently depending on the operation. For stores and the extension interface the whole buffer is directly connected to the data bus as a 32-bit register. For load operations, the data is fed out serially once it has been fetched from the data bus. To better support load operations of varying sizes the buffer contains logic for reading out data serially from any of the byte LSBs of the 32-bit word. Finally, in shift mode, the 6 LSB of the register is used as a downcounter that is initialized during the init stage and then counts the remaining number of steps to shift the data and signals using sh_done and sh_done_r when finished.
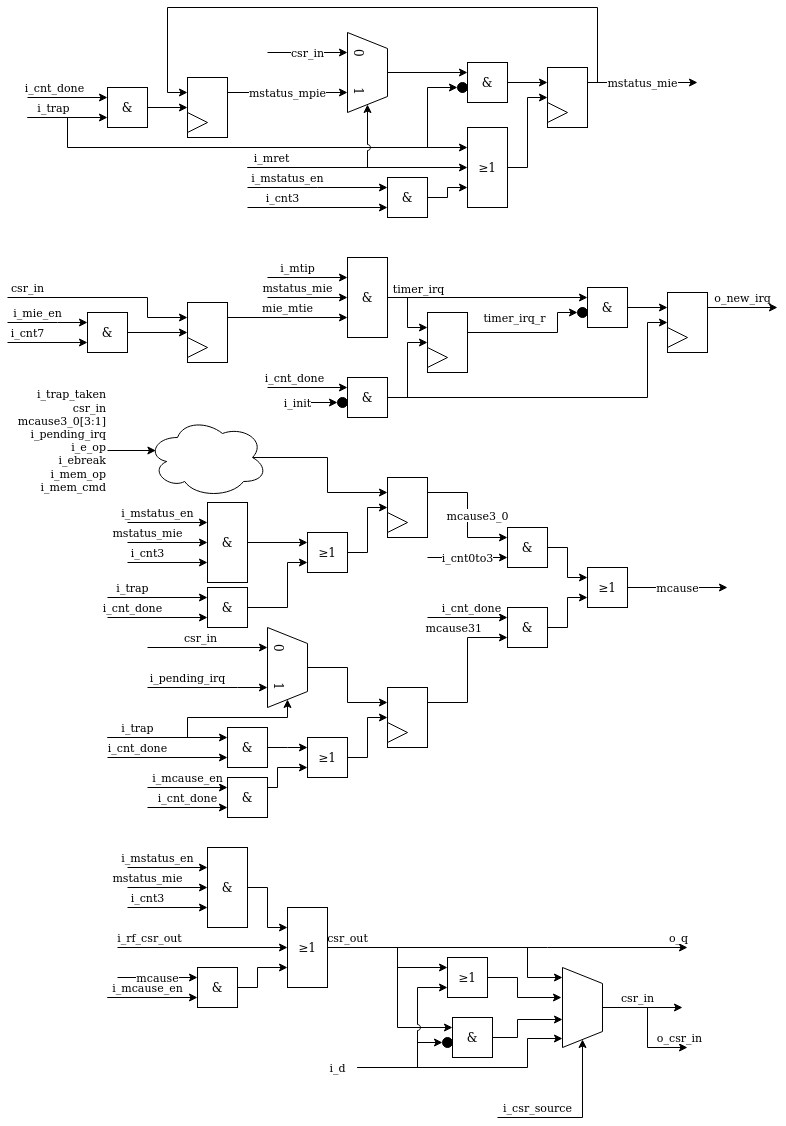
serv_csr¶
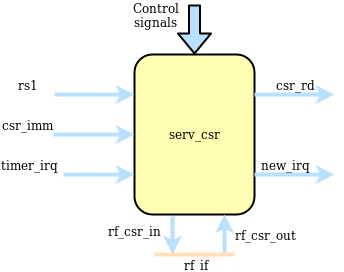
serv_csr handles CSR accesses and all status related to (timer) interrupts. Out of the eight CSRs supported by SERV, only four resides in serv_csr (mstatus, mie, mcause and mip) and for those registers, SERV only implement the bits required for ecall, ebreak, misalignment and timer interrupts. The four remaining CSRs are commonly stored in the RF
serv_ctrl¶
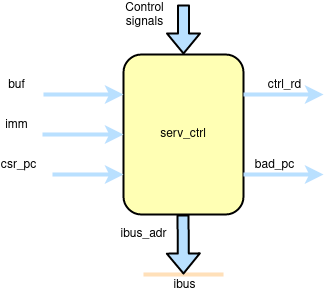
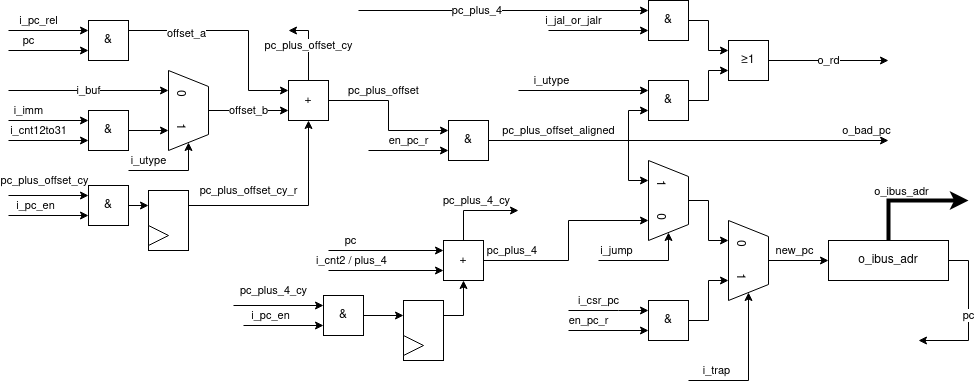
serv_ctrl keeps track of the current PC and contains the logic needed to calculate the next PC. The PC is stored in shift register with a parallel output connected to the instruction bus.
The new PC can come from three sources. For normal instructions, it is incremented by four, which is the next 32-bit address. Jumps can be absolute or relative to the current PC. Absolute jumps are precalculated in serv_bufreg and written directly to the PC. PC relative jumps have the offset part precalculated in serv_bufreg which gets added to the current PC before storing as the new PC. The third source for the new PC comes from the CSR registers when entering or returning traps.
Some operations (LUI, AUIPC, jumps, entering or returning from traps) also update the destination register through o_rd. In the case of misaligned instruction traps, the invalid PC is written to o_bad_pc to be passed to mtval.
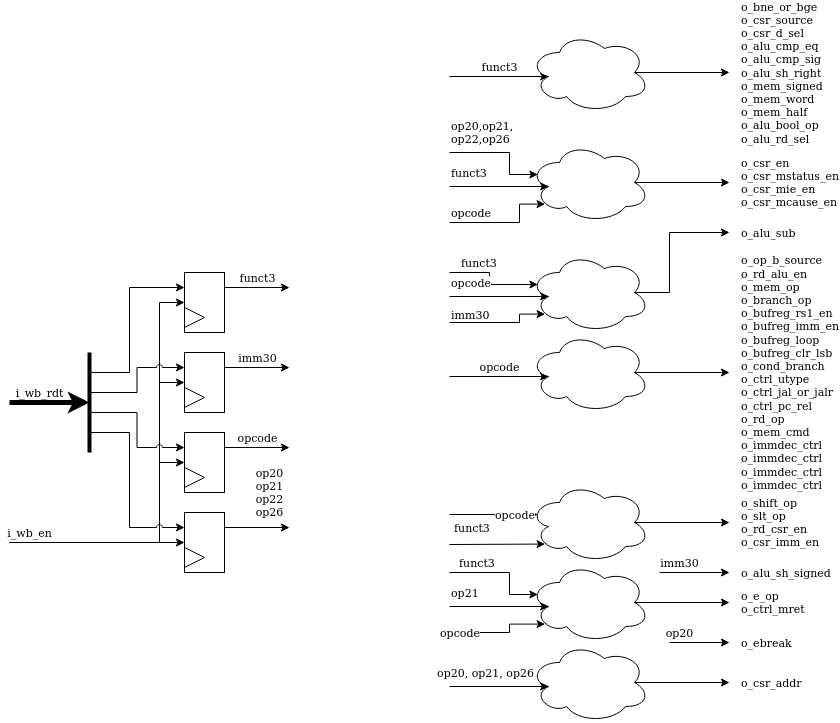
serv_decode¶
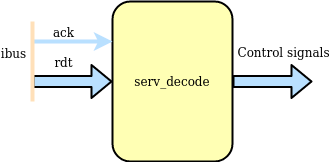
serv_decode is responsible for decoding the operation word coming from ibus into a set of control signals that are used internally in SERV.
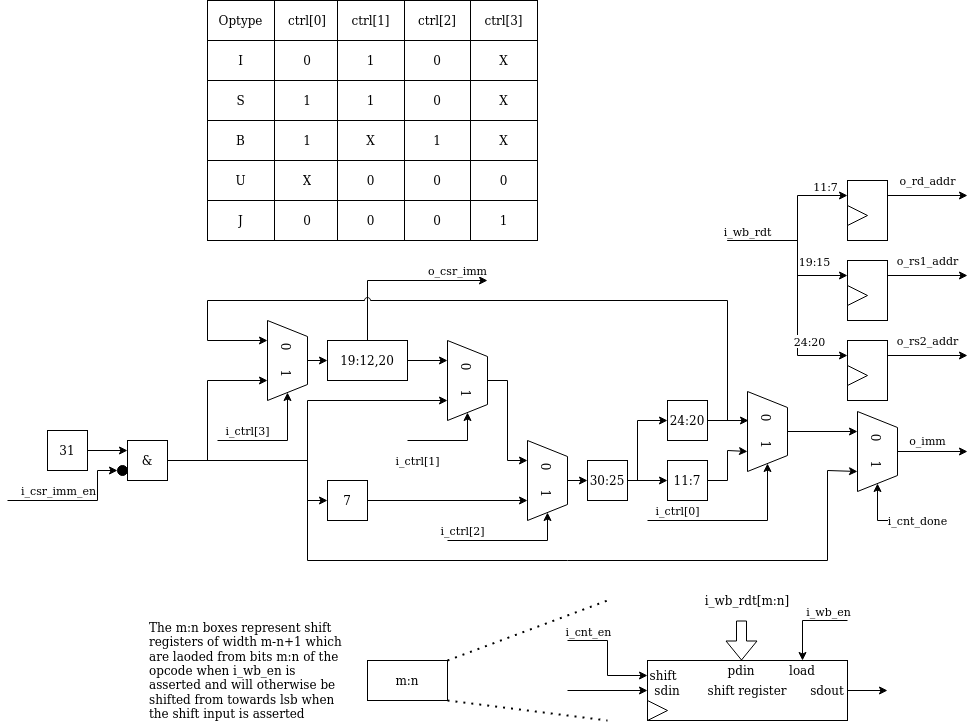
serv_immdec¶
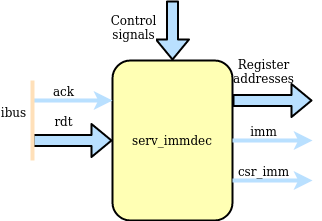
The main responsibility of serv_immdec is to stitch together the pieces of immediates from the instruction word and push it out in the correct order. When a new instruction arrives, the relevant parts are placed into a number of shift registers, and the connections between the registers are setup differently depending on the type of operation.
serv_immdec also extracts the register addresses from the operation word.
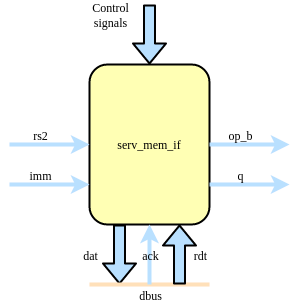
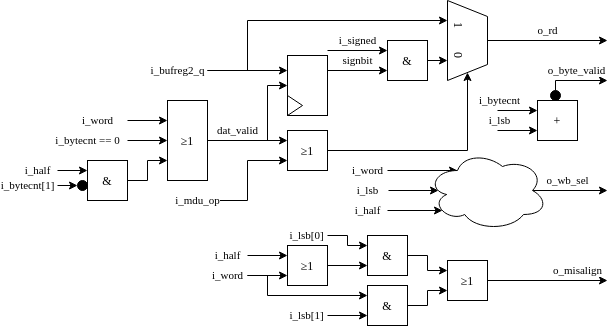
serv_mem_if¶
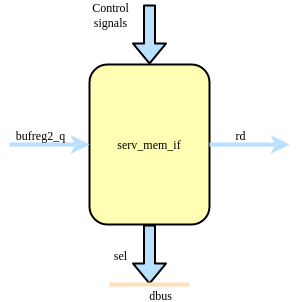
serv_mem_if contains the control logic for preparing the data to be sent out on the dbus during store operations and sign-extends the incoming data from bufreg2 during loads
The memory interface is centered around four serially connected byte-wide shift registers located in serv_bufreg2. During store operations, the o_byte_valid signal is asserted long enough to shift in the data from rs2 to the right place in the shift registers. The Data bus byte mask table summarizes the logic for when the individual byte select signals are asserted depending on the two LSB of the data address together with the size (byte, halfword, word) of the write operation.
During load operations, the data from the bus is read from serv_bufreg2. dat_en is again asserted to shift out data from the registers. i_lsb decides from which byte stage of the shift register to tap the data, depending on the alignment of the received data. The dat_valid signal makes sure to only present valid data to o_rd and otherwise fill in with zeros or sign extension.
When SERV is built with WITH_CSR, there is also logic to detect misaligned accesses which asserts the o_misalign flag to the core.
op type |
lsb |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|
sb |
00 |
0 |
0 |
0 |
1 |
sb |
01 |
0 |
0 |
1 |
0 |
sb |
10 |
0 |
1 |
0 |
0 |
sb |
11 |
1 |
0 |
0 |
0 |
sh |
00 |
0 |
0 |
1 |
1 |
sh |
10 |
1 |
1 |
0 |
0 |
sw |
00 |
1 |
1 |
1 |
1 |
Logic expression |
(i_lsb == 11) | i_word | (i_half & i_lsb[1]) |
(i_lsb == 10 |) i_word |
(i_lsb == 01) | i_word | (i_half & !i_lsb[1]) |
i_lsb == 0 |
|
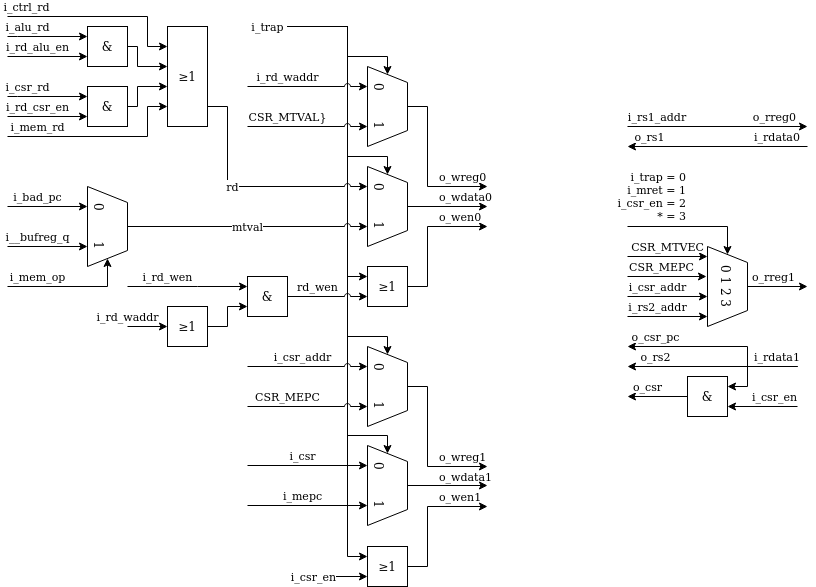
serv_rf_if¶
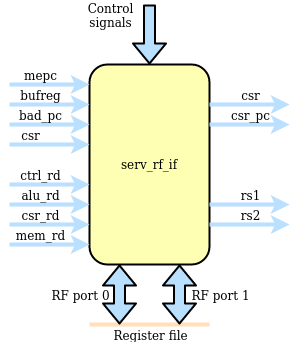
serv_rf_if is the gateway between the core and an RF implementation. It transforms all control signals that affect register reads or writes and exposes two read and write ports to the RF. This allows implementors to plug in an RF implementation that is best suited for the technology to be used. The general purpose registers are allocated to address 0-31. In addition, four CSR are defined at addresses 32-35.
serv_rf_ram¶
serv_rf_ram is the default RF implementation using an SRAM-like interface. Suitable for FPGA implementations
serv_rf_ram_if¶
serv_rf_ram_if converts between the SERV RF IF and the serv_rf_ram interface
serv_state¶
serv_state keeps track of the state for the core and contains all dynamic control signals during an operations life time. Also controls the accesses towards the RF, ibus and dbus
New instructions are fetched by asserting o_ibus_cyc until there is a response on i_ibus_ack. Instruction fetches occur when the reset signal is deasserted, which is what gets SERV started, or when the PC has finished updating its value.
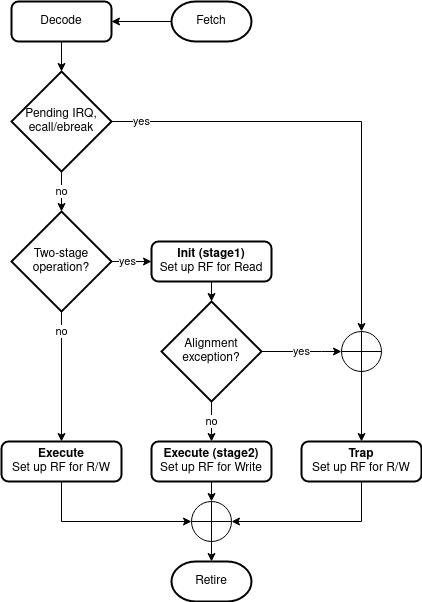
Instruction life cycle¶
The life cycle of an instruction starts by the core issuing a request for a new instruction on the ibus and ends when the PC has been updated with the address of the next instruction. This section goes through what happens between those points for the various types of instructions. SERV distinguishes between two-stage and one-stage operations with the former category being all jump (branch), shift, slt and load/store instructions and the latter all other operations. In addition to this, exceptions are a special case. Only two-stage operations (jump, load/store) can cause an exception. Regardless of instruction type, they all start out the same way.
Fetch¶
The bus requests begin by SERV raising o_ibus_cyc until the memory responds with an i_ibus_ack and presents the instruction on i_ibus_rdt. Upon seeing the ack, SERV will lower cyc to indicate the end of the bus cycle.
Decode¶
When the ack appears, two things happen in SERV. The relevant portions of the instruction such as opcode, funct3 and immediate value are saved in serv_decode and serv_immdec. The saved bits of the instruction is then decoded to create the internal control signals that corresponds to the current instruction. The decoded control signals remain static throughout the instruction life cycle.
The other thing to happen is that a request to start accessing the register file is sent by strobing rf_rreq which prepares the register file for both read and write access.
The interface between the core and the register file is described in a protocol where the core strobes rreq and present the registers to read on the following cycle. The register file will prepare to stream out data bit from the two requested registers. The cycle before it sends out the first bit (LSB) it will strobe rf_ready. Writes work in a similar way in that the registers to write has to be presented the cycle after rf_wreq is strobed and that the register file will start accepting data the cycle after it has strobed rf_ready. Note that the delay between rf_wreq and rf_ready does not have to be the same as from rf_rreq to rf_ready. Also note that register data will only be written to a register if the corresponding write enable signal is asserted. In the diagram below, only register r0 will be written to.
Execute¶
After the instruction has been decoded and the register file prepared for reads (and possibly writes) the core knows whether it is a one-stage or two-stage instruction. These are handled differently and we will begin by looking at one-stage instructions. A stage in SERV is 32 consecutive cycles during which the core is active and processes inputs and creates results one bit at a time, starting with the LSB.
One-stage instructions¶
Most operations are one-stage operations which finish in 32 cycles + fetch overhead. During a one-stage operation, the RF is read and written simultaneously as well as the PC which is increased by four to point to the next instruction. trap and init signals are low to distinguish from other stages.
Interrupts and ecall/ebreak¶
External timer interrupts and ecall/ebreak are also one-stage operations with some notable differences. The new PC is fetched from the MTVEC CSR and instead of writing to rd, the MEPC and MTVAL CSR registers are written. All this is handled by serv_state raising the trap signal during the instruction’s execution.
Two-stage operations¶
Some operations need to be executed in two stages. In the first stage the operands are read out from the instruction immediate fields and the rs1/rs2 registers. In the second stage rd and the PC are updated with the results from the operation. The operation-specific things happen between the aforementioned stages. SERV has four types of four two-stage operations; memory, shift, slt and branch operations. In all cases the first stage is distinguished by having the init signal raised and only performing reads from the RF.
memory operations¶
Loads and stores are memory operations. In the init stage, the data address to access is calculated, checked for alignment and stored in serv_bufreg. For stores, the data to write is also shifted into the data register in serv_bufreg2.
If the address has correct alignment, the o_dbus_cyc signal is raised to signal an access on the data bus after the init stage has finished and waits for an incoming i_dbus_ack, and incoming data in case of loads. After an incoming ack, o_dbus_cyc is lowered and stage 2 begins. For stores, the only remaining work in stage 2 is to update the PC. For loads, the incoming data is shifted into rd.
If the calculated address in the init stage was misaligned, SERV will raise a exception. Instead of performing an external bus access it will set mcause and raise the trap signal, which causes SERV to store the current PC to mepc, store misaligned address to mtval and set the new PC from mtvec which will enter the exception handler.
shift operations¶
Left-shifts and right-shifts are handled somewhat differently in SERV. In both cases the data to be shifted (rs1) is stored in serv_bufreg and the shift amount (rs2 or imm) in serv_bufreg2 during the init stage, but after that the methods diverge.
For left shifts stage two is started immediately during which rd is updated, but data is not shifted out from serv_bufreg2 until the number of cycles corresponding to the shift amount have passed. This effectively “delays” the data written from rs1 into rd, causing a left shift.
For right shifts, the opposite happens. Data is immediately shifted out from serv_bufreg after stage one ends, but stage two (and writing to rd) doesn’t start until shift amount cycles have passed. After all valid data has been written from serv_bufreg, the remaining cycles are zero-padded or sign-extended depending on logical or arithmetic shifts.